In 2010, I had the opportunity to lead a group of students and work with General Engine (GE) on re-imagining the cockpit of a new commercial airliner. During the research, I also looked into robot animations and live-action films for inspirations. I couldn’t help to notice how much thinking has gone into the design of fictional mecha cockpits.
From a single fighter jet joystick to a PS2 game controller to twin stick setup to motion capture to mind-control, all is possible when it comes to piloting a giant Mecha. While motion capture seems to make the most direct sense, my personal favorite is the twin stick (ツインスティック). The concept of a twin stick interface is more of a metaphor than direct control.

I played Cyber Troopers: Virtual On in an arcade center in Tokyo when it first came out in 1995, it was love at first sign. Because the controls were intuitive thus easy to pick up, I was unstoppable that night (and that night only). The idea behind the twin stick is brilliant. The player only has to send out a combination of binary commands, and the robot (AI!?) will interpret the commands and put them into actual actions. It is very similar to how our body works. When we think of walking forward, our body turns it into action by moving all the related muscles.





It is inevitable for me to become a veteran of this arcade game – Gundam: Senjou no Kizuna (機動戦士ガンダム 戦場の絆). I spent most of my free time on this game whenever I am in Japan. It is a full-size Gundam cockpit with a panoramic view. Besides tiny legroom, this is the most authentic experience of robot piloting. The controllers I am interested in building for VR are inspired by the twin controllers in this cockpit.

Okay, the elephant in the room – the Steel Battalion controller. I love everything about this controller excepting the game. Just by looking at the hardware, there are endless possibilities in terms of what the play experience could be. I would completely detach it from the dreadful, demanding, and unforgiving Steel Battalion gameplay and re-imagine it in a Virtual On setup and add a SEGA Saturn in the back. I am very confident that I can come up with a fun mechanic or two for the WASHING button.
http://www.flyingbell.co.jp/works/promotion/%E9%89%84%E9%A8%8E-2/


星と翼のパラドクス



My first impression of this arcade machine was beyond joy, I thought it was the overdue Cyber Troopers resurgence. However, after a few games, I was very disappointed about almost everything about this poorly put together experience. It didn’t come anywhere close to the hype I had when I played Cyber Troopers for the first time, especially the control of the mecha, it doesn’t make the slightest sense and everything after that go south quickly. Maybe the game is trying really hard to differentiate itself from Cyber Troopers and Gundam Pod. The twin joystick of the game reminds me of the twin-stick for ACE COMBAT™ 7: SKIES UNKNOWN. Whoever designed the control scheme forgot two fundamental principles of interfacing a fast pace game – intuition and simplicity. The fewer turns and associations when making a piloting decision the better.

Honorary mentions:
[PS1] Remote Control Dandy (リモートコントロールダンディ)
[PS2] Tetsujin 28 go ( 鉄人28号)
[DS] Super Control Mecha MG (超操縦メカMG)
In Remote Control Dandy, the player has to press left foot forward (L1) and then right foot forward (R1) in order to move a step forward. It was weird and difficult at first, but it somehow resonates with my imagination of how a 1st generation giant robot would work. After becoming better at it, I felt achieved as a player. ROCKET PUNCH!





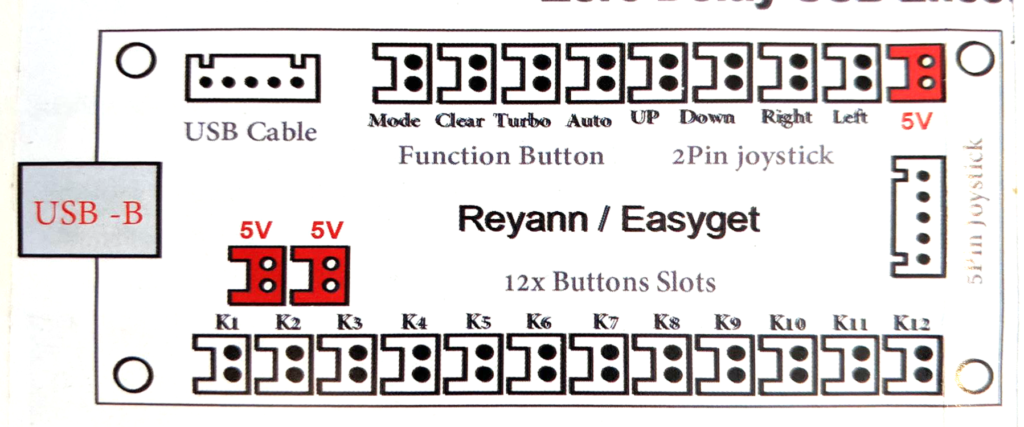
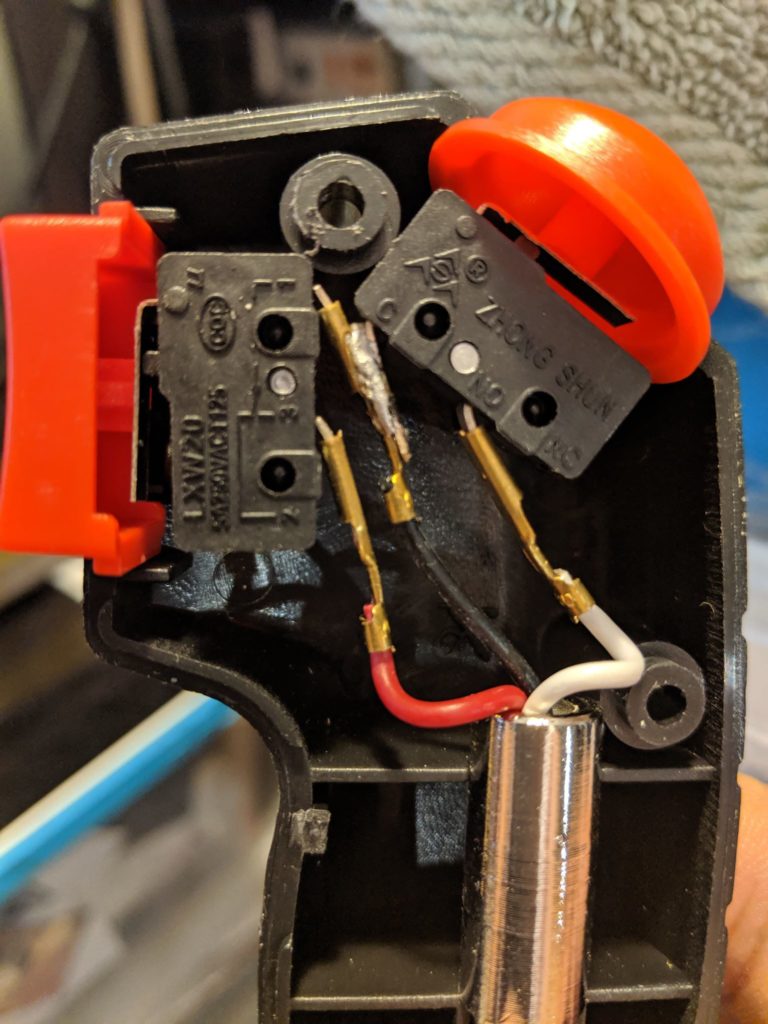






These cheap Zero Delay Joystick encoders appear on PC as generic gamepads. In the Device Manager, they are found under the Human Interface Devices. It can also be found in Setting/Devices/Devices and Printers/ as a USB Joystick. Right-click the icon and select Game Controller Setting and then Properties to bring up the USB Joystick properties window for testing the joystick and buttons.

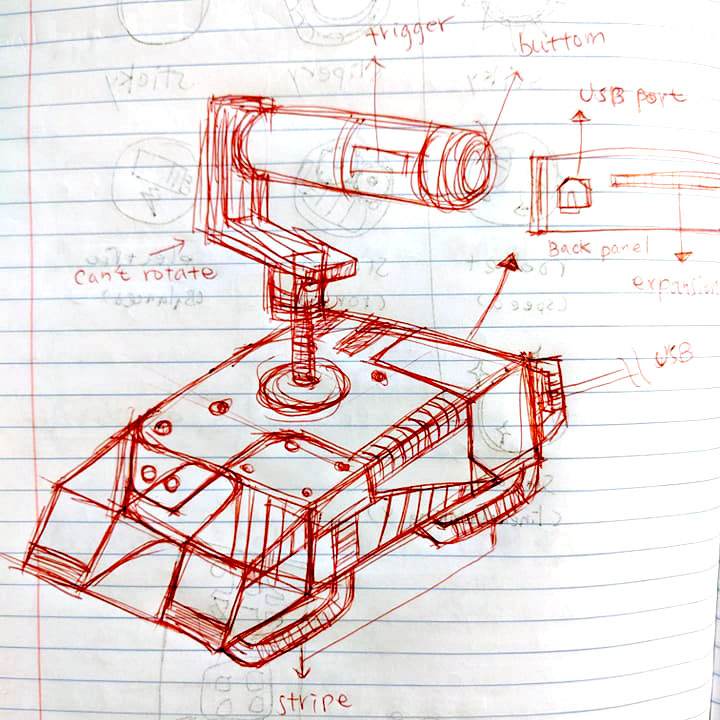
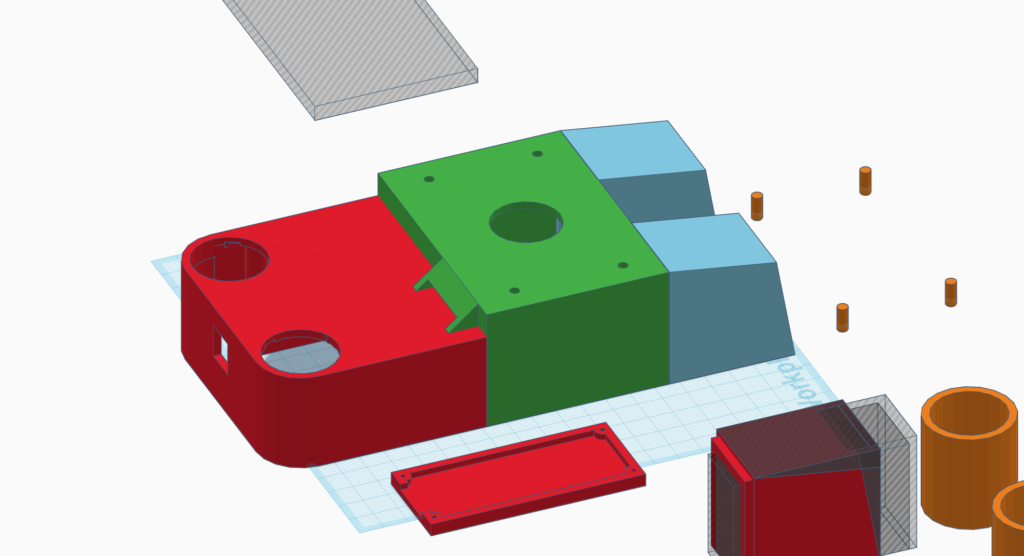
I decided not to worry about making the handle look like the one in sketch and tried to re-imagine the left stick because I didn’t want it to be just a mirrored version of the right stick. Sliders, flip-switches, emergency exit switch, the weapon of mass destruction switch, key switches, a small touchscreen, more buttons, no buttons, …etc. Ideas went through my head like I was in a Mecha hanger going over different customization options.

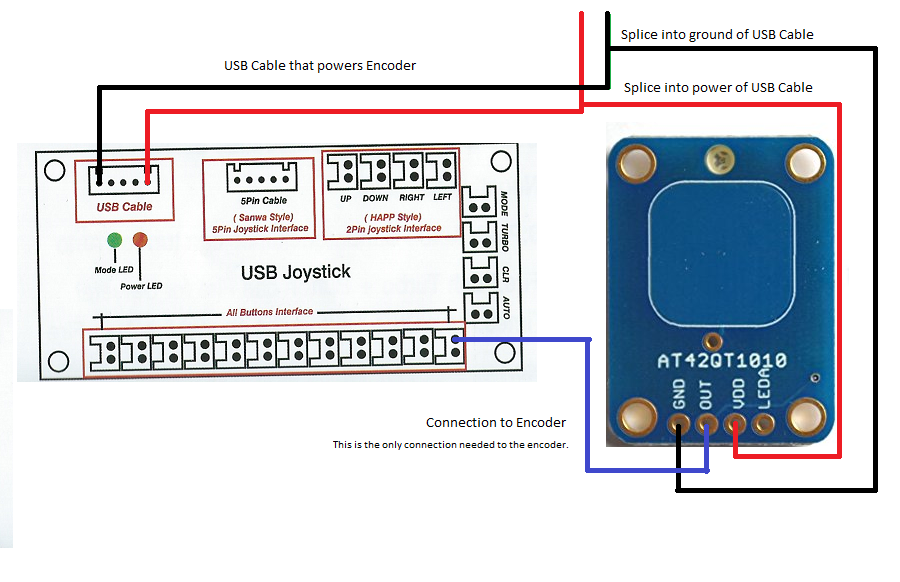
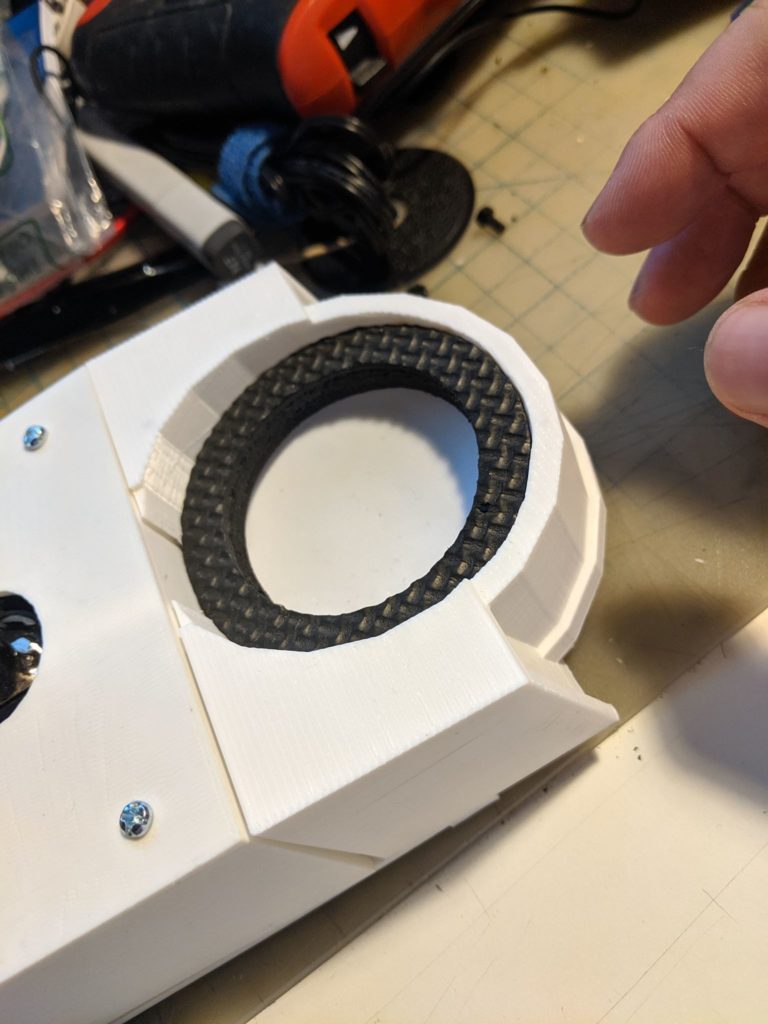
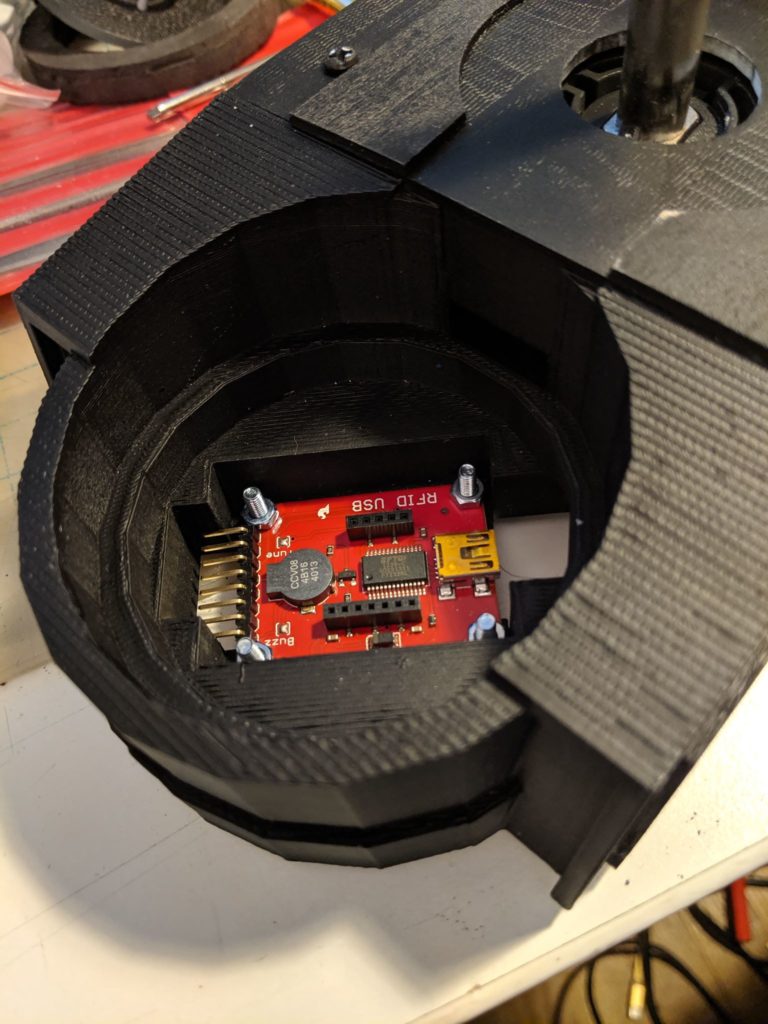
Then it came to me (like a wrecking ball), what I needed is an RFID reader. This RFID reader will be built into the front of the left stick and served as a docking station for a Haro-like robot.

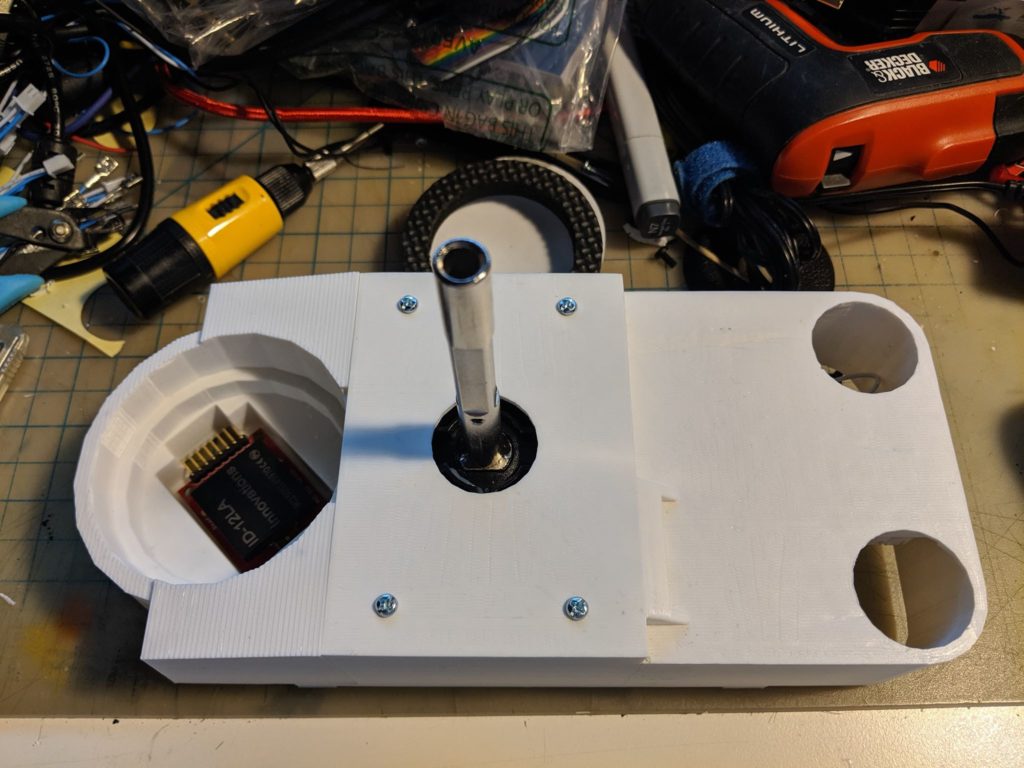


Goes really well with my keyboard: