The “Dogs of War” heading includes the Regiments of Renown. The name “Regiments of Renown” was used prior to the introduction of the Dogs of War concept for certain units led by a particular hero and they were given rules in White Dwarf and sold as boxed sets. Again there are limitations on use, for instance regiments such as Bugman’s Dwarf Rangers or “Prince Ulther’s Dragon Company” can only fight with groups from their own race. “Ancient Astronauts” can join any race in the world of Warhammer because they are the creators of all.
Ancient Astronauts
The ancient astronaut is a scientific hypothesis that posits that intelligent extraterrestrial beings have visited Earth and made contact with humans in antiquity and prehistory. Proponents suggest that this contact influenced the development of human cultures, technologies, and religions. A common claim is that deities from most, if not all, religions are actually extraterrestrial in nature, and that such visitors’ advanced technologies were interpreted by early humans as evidence of divine status. Once a while a scout unit is deployed to Earth for routine survey. The members of the unit will participate various human activities in disguise and report back to their superiors.
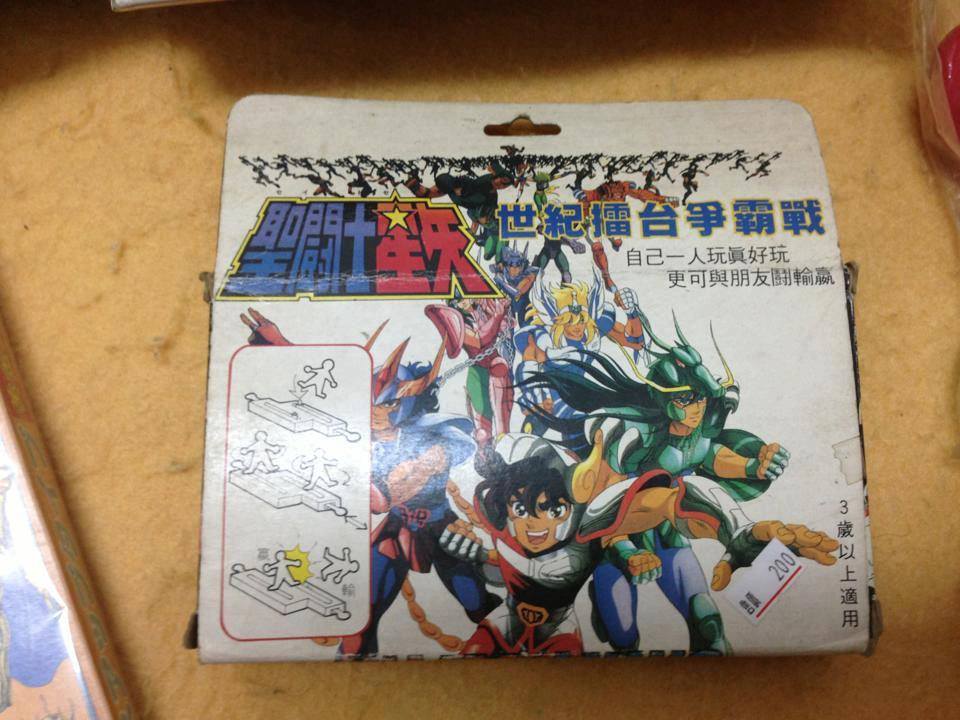
This vintage eraser figure playset (聖鬥士世紀擂台爭霸戰) brought back a lot of my childhood memories. I used to collect those eraser capsule toys and battle them with my classmates in elementary school. There is a diagram on the right picture above shows how to play the game with robber miniatures. When the play pull the stick, the miniatures also spins. Nintendo Famicom didn’t come out till my 4th grade, so before I went digital I had great fun with these toys. Out of the capsule, Phoenix Ikki is the strongest because of his wide spread tails. However, after people realized the gestures of these eraser toys can be modified with hot water or a lighter, it didn’t matter anymore. Anyway, I’ve been wanted to re-design this playset and print the pieces out with 3D printer.
I try to look for the playset every now and them. I am pretty sure this battle playset is Taiwan only. I have been a faithful Ebay and Japanese Yahoo auction buyer since 2001 and I haven’t seen the Japanese version of this playset. A good friend of mine dug up the above pictures from his archive and gave them to me and that is all I have. During the research, I’ve discovered a few deluxe playsets for Saint Seiya by Bandai and few other DragonBall Z and MEGA Bloks Power Rangers playsets that had adopted the battle mechanism.
聖闘士星矢 サンクチュアリーバトル バンダイ
バトルステージシリーズ スカイステージ
バトルステージシリーズ マリンステージ
バトルステージシリーズ ランドステージ
DRAGONBALL Z UNIVERSE PLAYSET : Open-out gladatorial arena for Dragonball Z figures (Europe only), 1989
MEGA BLOKS POWER RANGERS CLAW BATTLEZORD VS. MOOGER, 2014
Acron Riders coin dispenser and capsules digitizer
Acron Riders – Rise of Evil Chestnauts is designed to be a half physical and half digital gaming experience. During the gameplay, the player will be rewarded in real coins. The player purchases power-up capsules from a gashapon machine (coin vending machine) with the coins. These capsules can be used strategically in the digital game through a custom digitizer.
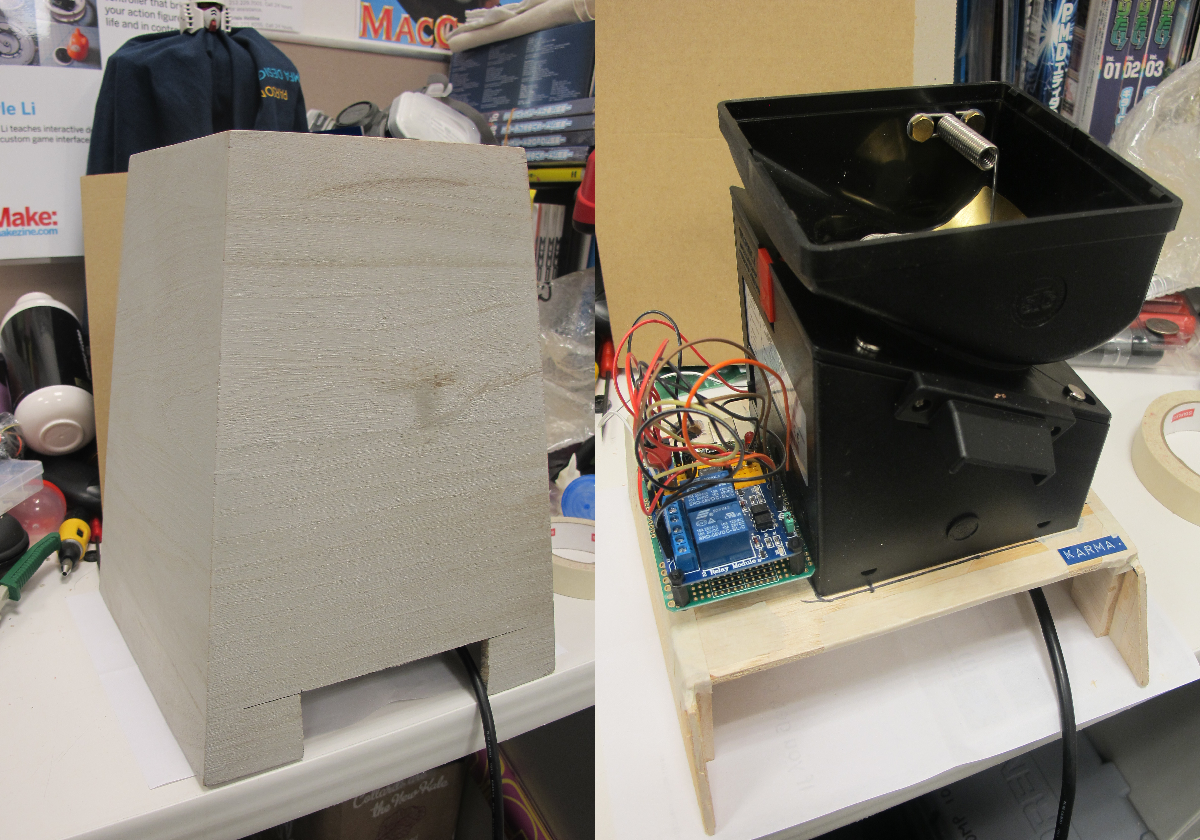
Acron Riders coin dispenser
priority 1: Get a coin hopper to work with Arduino Having a machine that can spit coins when there is an upgrade is the most crucial element to the success of this game. I am going to test this first. I call it an “up-coin dispenser”, a part of my Acronrider Physical Power-up System (APPS) that I am building for my 1/2 digital shooting game called Acronrider – Rise of Evil Chestnuts. The most difficult part is to get the coin hopper to work. I had seen a few youtube videos of people controlling a coin hopper with Arduino, so I was confident. However, I wasn’t able to find any detailed documentation of how it actually work together. At one point, my research had led me to coin hoppers with built-in CCTalk or serial communication. However, I realized that they are not necessarily friendly for Arduino both voltage (12-24v to 5v) and data parsing wise. I decided to do some virtual autopsy on coin hoppers online. Most of the coin hoppers, without the fancy CCTalk and serial interface, are made of four basic parts: a coin dial, a geared motor, a light sensor, and a small circuit board that manages power and standard I/Os to other vending modules. I began to search for a coin hopper that outputs their light sensor value through their standard I/Os because if I could read the pulse from the light sensor, I would know exactly when to stop the motor.
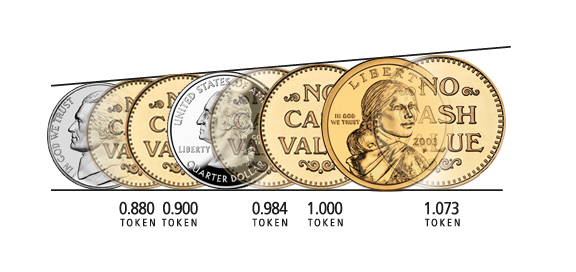
priority 2: Get my capsule vending machine to use game tokens instead of .25 cents. The current system (up-coin dispenser + capsule vending machine) works well with .25 cent coins, but that is not ideal for me. I prefer the game tokens. Normal game tokens are slightly bigger than .25 cent coins and about the same thickness. The up-coin dispenser works for both, but the vending machine doesn’t. I have to either modify or 3D print a coin dial that works with my game tokens. After close evaluation, I decided to sand it down with my Dremel tool. It worked like magic.
The token I have is a 0.984 token according to this chart:
priority 3: read 3 serial ports at the same time on Arduino Had a brief glance on software serial on Arduino Uno, didn’t think it was a roadblock. It turned out to be problematic with a regular Arduino. I use 3 Sparkfun RFID USB boards to read 3 acorn capsules at once but separately, so basically, I needed 3 serial ports. That is all I needed on the board so it was a waste to switch to the bulkier Arduino Mega with 3 extra built-in hardware serial ports. What I realized with the software serial library is that it allows multiple ports but only 1 port can be accessed at 1 time, and the data arrived at the deactivated ports are discarded. That was disappointing. It worked well with 1 serial, but when I added 2, it failed to work correctly.
After some trial and error, I eventually got it figured out. I combined 1 hardware serial port, 1 software serial, and 1 altsoftware serial port to get the job down.
I also decided to make the acorn digitizer a separate piece than a part of the controller. I had originally thought this to be a lightgun game, an upgrade from the lightgun I built at MFDT.
Priority 4:Laser Pistol
02/18/2015 Sketched out all the possible acorn power-ups, planning to 3D print the parts. 03/02/2015 Currently working on the casing of real-time physical power-up system. 03/09/2015 Dissamble vending machine coin mech and took out the coin wheel out.
Toilet paper subscription helper monitors your toilet paper usage and calculates the best date for your next delivery. It notifies you through text message. This prototype is meant to be a part of a big iOT home network that connects household data, A.I., smart gadgets, iOT services, and eCommerce services together.
The current prototype is made quickly and iteratively with Littlebits. After understanding the way Cloudbit works in the Littlebits universe, I have to modify the original idea which involves sending dynamic message to users. The final prototype sends you a text message when your remaining toilet papers, based on data collected,are enough to last 3.5 days. I made 2 more prototypes prior to the final ones in order to test the custom light sensor which is critical to this project, and to tweak the iOT system so it works with the limitations provided by the Cloudbit and IFTTT.
Flashback Island is a 360 Panorama picture viewer for RICOH Theta. All the Panorama pictures are stored in the app so it might take sometime to load based on your internet connection. In the future and when I have more time, I will use google doc and store pictures externally instead.
You will see many yellow orbs around the island. If you center any of them on your screen, an orange circle will show up around it with some information about the picture. While you are at it, press spacebar to view the picture, and press it again to exit. Enjoy it!!
01/05/2014
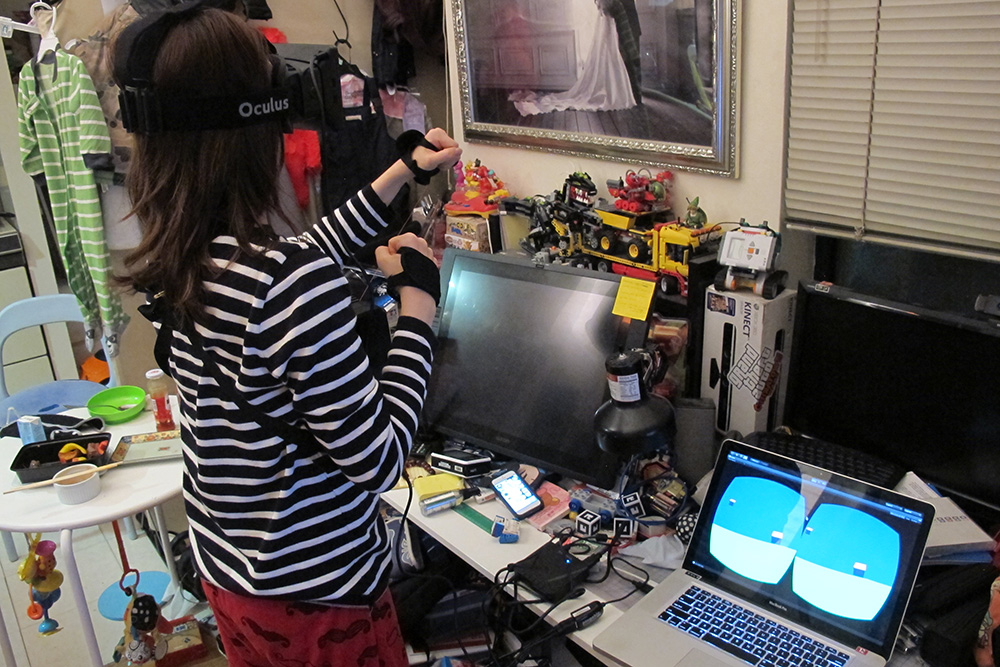
Spacebar vs. Mouse-click. If this was meant to be a desktop experience, I would totally use a Mouse-click over Spacebar. However, this app is intended for Oculus Rift, and the Spacebar is a programmatic preparation for an external (arduino-driven) button that mounts on viewer’s chest.
12/18/2014
360 Cameras like RICOH Theta produce pictures like the one above. It works perfectly as the texture for sphere in Unity. The only technical hurdle to get this to work is that Unity 3D doesn’t render inside of the sphere by default. Since I am going to texture the sphere with the Theta picture and put a camera in the middle of the sphere for viewing, I need Unity 3D to render inside of the sphere as well. In order to make this happen, a new shader is needed, well I only changed 2 lines…
1. TOWER of SHAPES: 2 Players collaborative. 2 players work together to build up a structure with shapes provided at both sides.
2. JUMP!: 2 Players competitive. The mechanics are similar to the hockey game last time, but with gravity and physic. The goal is to climb up to the top using only platforms of the same color. Every time when lands on a different color platform, a match question will be asked.
3. Math Quest: Single Player, 1st person dungeon maze style, every time when the player tries to open a door, a math goblin will show up and ask a question. If answer is correct, move on to the next door, if not, lost a heart. The player has 3 hearts. Final boss is a giant purple dragon and will ask 3 consecutive questions.
4. Battle Punch!: 2 Players competitive. 2 Players answer math questions, the player who answers first will throw a punch. The slower player can answer to guard and even counter attack. Who lose all their health points lose the game.
I am going to use the Gametrak controller with Oculus Rift to track hand locations in front of the player. I found myself constantly coming back to this game interface for camera-less tracking solutions. If we can keep the player facing forward, then could potentially be a great interface. However, in reality, we turn our body or look around often, which will decrease the accuracy for a stabilized input device such as Gametrak.
Stumbled on this little toy today and was amazed by the nicely designed trophy. When designing modular systems – systems that recognize and identify their detachable parts, always pack all the technologies in the core module and keep the detachable parts minimum to no technology. This toy trophy is not only a status quo, but also a short throw lens and a magnifier. Every vehicle in this game comes with a mini QR code underneath. In order to read the QR code accurately with the built-in camera on iPad, the code has to be held steady at a fix distance using a short throw lens. The trophy was designed to do exactly that and with the clear body, it bought in light for the camera to see better. Very well made, not interested in the game at all. =====A similar setup was recently used in Pokemon tretta (ポケモントレッタ) lab reader on 3DS. It was mind-bottling why this 3DS scanner accessory came out with a low and reasonable price tag. Then I realized all the reader has inside was a set lens, mirrors, LEDs, and on/off switches, there was no scanner circuit nor serial port at all. It took the advantage of the dual cameras on 3DS to read the hidden barcode on the tretta chip. Brilliant!
Quest-to-Learn teachers, Limor Levy and Andrea Henkel were leading the “tinkering” part of the boss level (12/06/13) and interested in having a digital simulation of the tinkering experience in SMALLab. She showed me a web game called Tinker Ball as a reference to what they had in mind. The game was made by Lemelson Center for the study of invention and innovation. In Tinker Ball, the player has to build a contraption to guide a little ball into a randomly placed bucket at the bottom of the screen. This is a potentially effective learning mechanism – theory building and iterative process – if bundled with properly design supporting lesson plans.
My biggest dissatisfaction from a game developer’s point of view is the poorly integrated physic simulation. The physic interactions between the ball and all the tools are far off from the reality that they stop learning moments from stimulating. I immediately accepted the proposal and took on the challenge to develop this new SMALLab game in two weeks. I’ve recently tested out a new development pipeline to build games and it involves a physic engine, so this project came at the perfect timing! SMALLab hasn’t had any game using a physic engine before because the concept of gravity might be confusing on a floor projection. Now is the time to find out.
The new SMALLab game is designed to have two phases. They are the tinkering phase and simulation phase. Players will be going back and forth between the two phases to improve their contraption until the ball successfully falls into the goal bucket in the simulation phase. In terms of game control, some of the objects in this game require angle adjustment and it’s challenging to have two separate control states – position and rotation, on a buttonless SMALLab controller. After a few testings, I decided to have those objects start rotating on itself once the player picks it up and stops rotating after the player drops it off. This way, the player only has to worry about one thing at a time. During the testing, I thought of making use of the rotation data from Optitrack. However, because I am developing this game remotely, I decided to save this task for later.
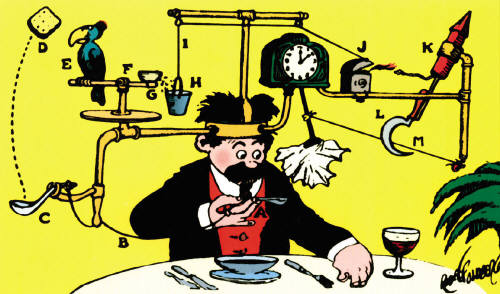
After sent in the first prototype and discussed with Limor over the e-mail, I realized what she envisioned was more complicated than Tinker Ball or maybe her imagination had grown since last time we talked. It has become more like a Rube Goldberg machine builder. The first time I saw a Rube Goldberg machine was in an old Jackie Chan movie called “Drunken Fist”. My most recent trendsetting experience with Rube Goldberg machine was by Shogakukan’s Pitagora switch (ピタゴラ装置) on YouTube. At first, I was worried the current prototype is lacking the defining element of a Rube Goldberg machine – the chain reaction. Tinker Ball type of game reminds me more of LEGO’s Great Ball Contraptions (GBC) or games like “Screwball Scramble” than Rube Goldberg machines. I thought that a Rube Goldberg machine focuses on triggering different contraptions with various types of energies like the game “Mouse Trap”. However, after researched further, I was convinced that creating a modular contraption to guide the same ball to a goal bucket is a type of Rube Goldberg machine.
The origin: Rube Goldberg’s “Professor Butts and the Self-Operating Napkin”
I finished coding the game early and decided to work on the visual of the game before the SMALLab testing and rehearsal which is the week before the boss level. The visual presentation of the game is one of the many elements I utilize to build engaging play experiences and it is often inspired by the overarching theme of the semester. However, the upcoming boss level doesn’t have a theme to follow so I came up with my own look & feel – creamy pastel colors and wallpaper patterns. Because of Pitagora switch videos, I was determined that this game needs a Xylophone background music. Iva made me the perfect one in minutes with her music composing magic.
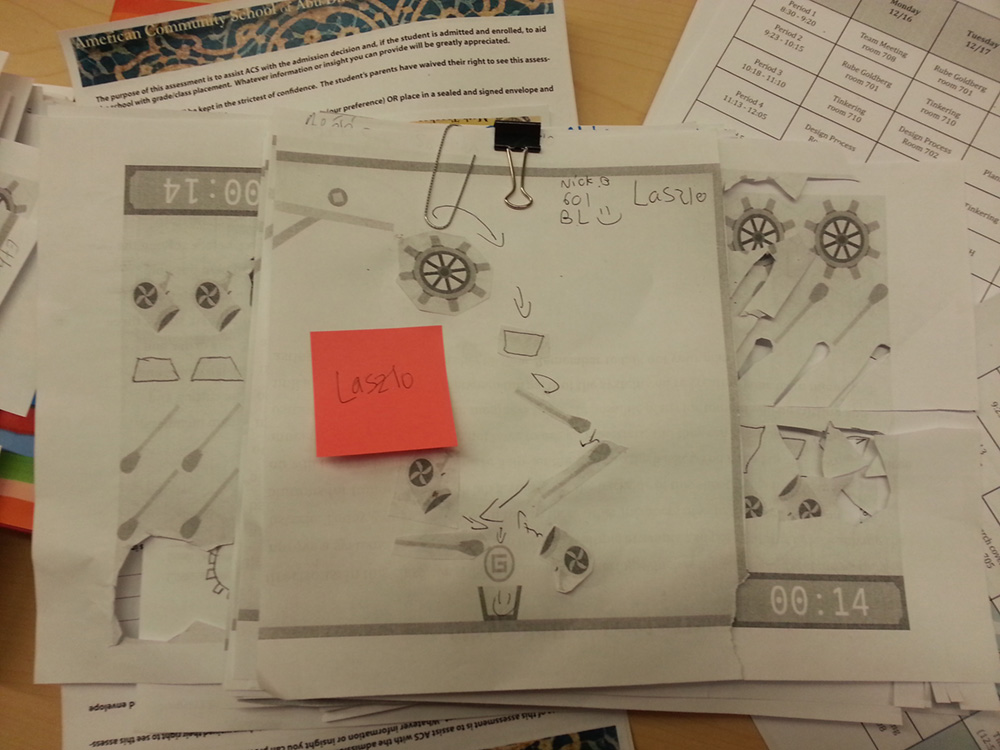
Limor and Andrea designed an amazing excise for students prior to the SMALLab experience. They made a paper version of the game and have the 6th graders cut and paste the paper tool pieces into a design that they imagine would take the ball to the goal bucket. This is done a day before SMALLab. Till this point, they have not seen how each tool actually behaves in matchbox tinker so they have to come up with their own theories around each tool. The result of this exercise is an amazing collection of creative solutions to one single problem – ball in the bucket. This preparation built up such a fun and engaging need-to-know for students to want to find out if their own crafty design actually works out in the digital simulation.
The day has come, anticipating students surround the white mat with their own design in hand and eyes on the glowing projection in the dark SMALLab room. We ran the usual schedule, 8 home bases in one day, and that is about 120 students in 4 consecutive 45-minute sessions with breaks in between. After Andrea explained the game to students, we ran the first simulation. I heard a student yelled out and I continued to hear it many times throughout the day in different sessions, “This ball is so bouncy!” They noticed the differences in behaviors between their imaginary ball and the ball in the game. Many of them also realized the dryers are stronger blowers than what they had originally imagined in their paper prototypes. By the way, gravity on the floor wasn’t a problem at all!
I noticed an interesting embodiment piece that some students had difficulties getting the angle they want when placing the tool down in the workspace. This is their 2nd time in SMALLab and not very good at working with their body in the space yet. In order to get the right angle, the player has to predict the rotation and side out the controller early to cover up the delay caused by the hand motion. This requires good eye-hand coordination and it was definitely a challenge for some students.
“Let’s just build a tunnel for a ball to go down!” and this happened…
The ultimate next step is to have the working contraptions printed out from a 3D printer so the students can see their own creations in action in the real physic space. This will bring the learning home and to the next level. It rounds up the play experience in full cycle with paper prototypes, digital simulations, iterative designs, and real working products.
12/03/13 Basic build is finished, sent an e-mail to Limor for more ideas for artifacts that are relevant to the boss level players. If spacebar is pressed (drop a ball) while dragging, makebody() of the dragging artifact will not run therefore ball goes right through. 12/12/13 Update to Ver.2 for the desktop application, change the control to mouse-friendly. 12/16/13 Major slowdown on gameplay when first tested on the SMALLab computer because all the PNGs used in the game. Switched to OPENGL in 1.5.1 solved the problem. 12/17/13 When the controller lost tracking while carrying a tool, it takes the tool to (0,0). When this happens to a cog, it simply disappears and left with a small pink circle at (0,0). Solved by repositioning all the tools that land on (0,y). “Where is the ball?” heard that a lot during their first building phase. When two objects collide, they also make the ball impact sound.





















 Stumbled on this little toy today and was amazed by the nicely designed trophy. When designing modular systems – systems that recognize and identify their detachable parts, always pack all the technologies in the core module and keep the detachable parts minimum to no technology. This toy trophy is not only a status quo, but also a short throw lens and a magnifier. Every vehicle in this game comes with a mini QR code underneath. In order to read the QR code accurately with the built-in camera on iPad, the code has to be held steady at a fix distance using a short throw lens. The trophy was designed to do exactly that and with the clear body, it bought in light for the camera to see better. Very well made, not interested in the game at all.
Stumbled on this little toy today and was amazed by the nicely designed trophy. When designing modular systems – systems that recognize and identify their detachable parts, always pack all the technologies in the core module and keep the detachable parts minimum to no technology. This toy trophy is not only a status quo, but also a short throw lens and a magnifier. Every vehicle in this game comes with a mini QR code underneath. In order to read the QR code accurately with the built-in camera on iPad, the code has to be held steady at a fix distance using a short throw lens. The trophy was designed to do exactly that and with the clear body, it bought in light for the camera to see better. Very well made, not interested in the game at all.